Hardware Reference¤
Tato sekce shrnuje hardwarové vlastnosti Robůtka.
Obecné hardwarové koncepty¤
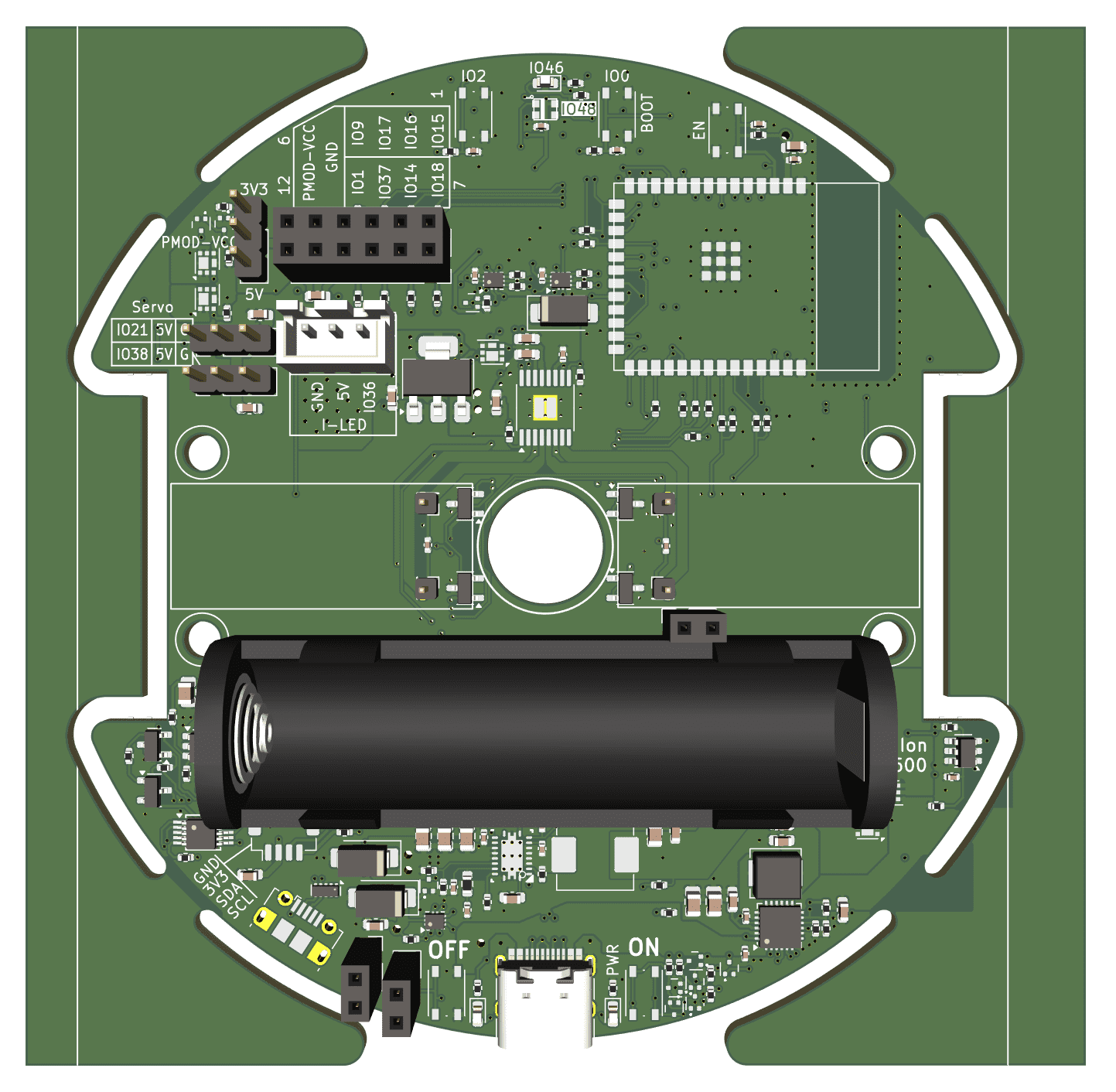
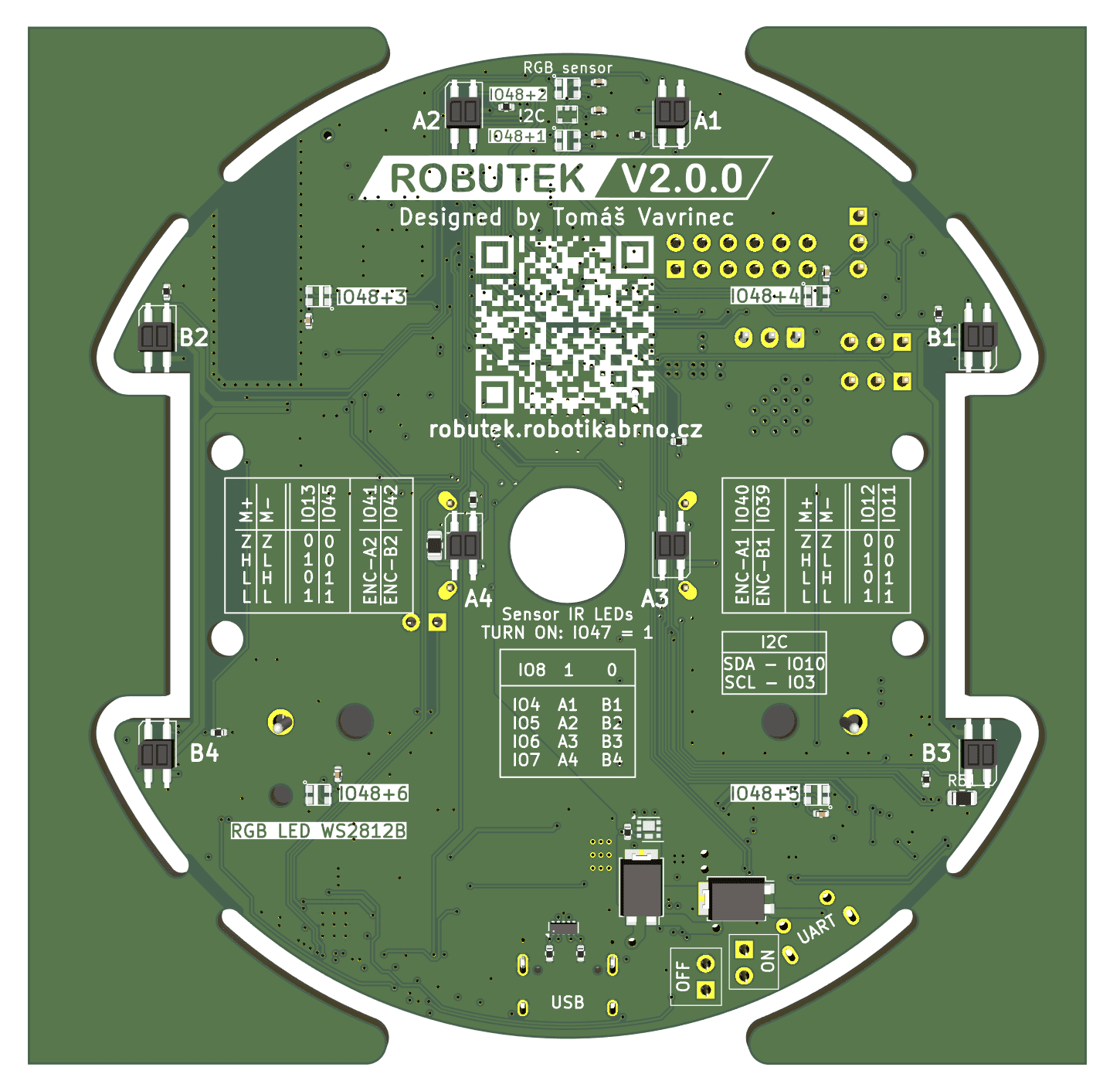
V hardwaru Robůtka jsou použity zejména tyto periferie:
GPIOpro digitální vstupy a výstupyADCpro čtení analogových hodnot z odrazových senzorůPWMpro řízení serv a motorůkvadraturní enkodérypro zpětnou vazbu pohybu motorůI2Cpro senzoryWS2812Bpro RGB podsvícení
Obsah sekce¤