Programování robota¤
Programování:¤
Robůtek je řízený mikrokontrolérem ESP32-S3. K programování budeme používat jazyk TypeScript, který budeme spouštět pomocí programu Jaculus.
Robůtka je samozřejmě možné programovat i v jíných jazycích, například C/C++ pod ESP-IDF, nebo Arduino. Pro tyto účely se dokumnetace stále dá použít jako zdroj informací, i když ne ukázek kódu.
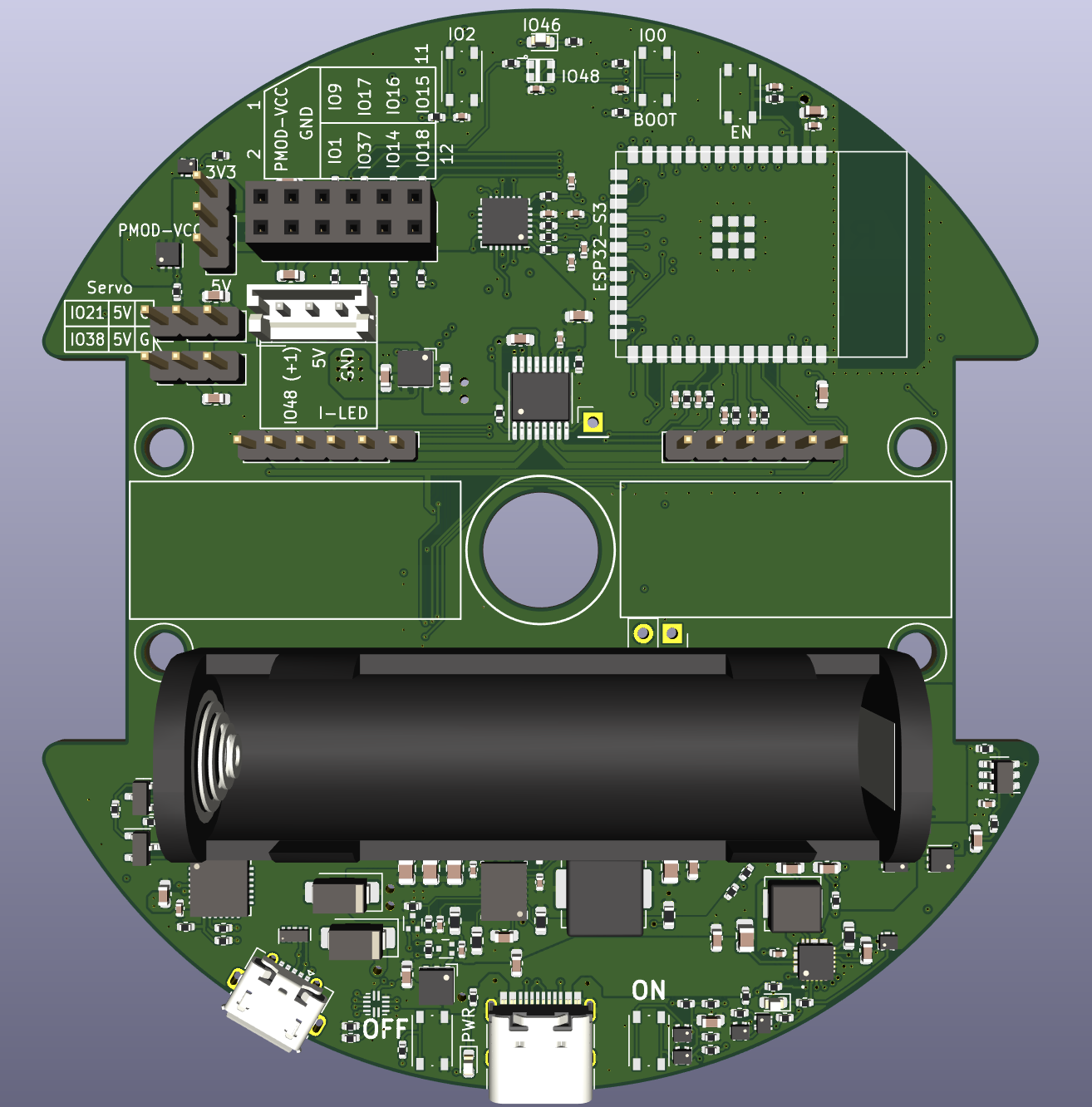
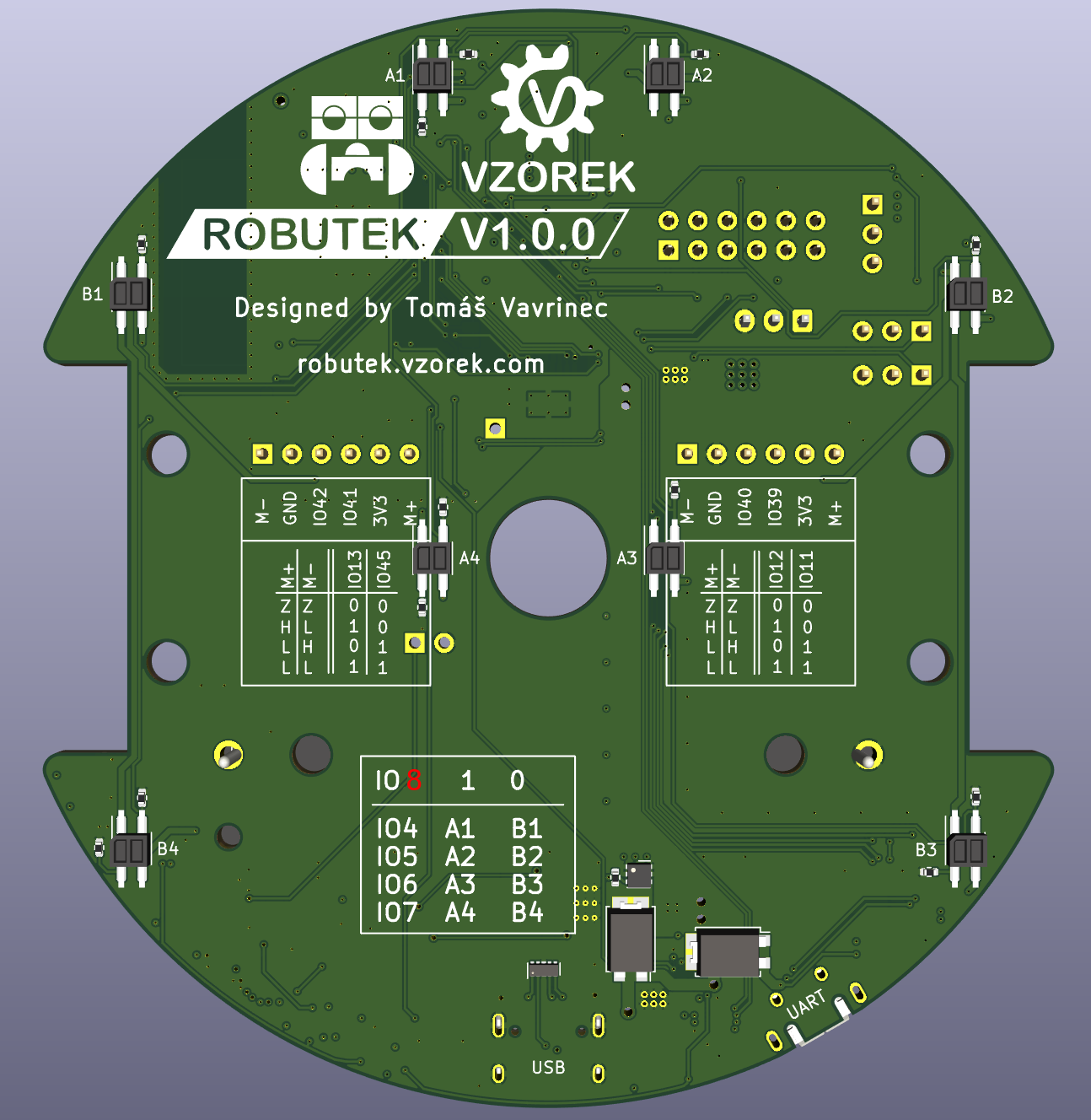
Přehled pinů¤
Čísla pinů nemusíme přepisovat ručně, lze použít definici z knihovny:
import * as gpio from "gpio";
import { createRobutek } from "./libs/robutek.js"
const robutek = createRobutek("V2");
gpio.pinMode(robutek.Pins.StatusLED, gpio.PinMode.OUTPUT);
gpio.write(robutek.Pins.StatusLED, 1)
Pro kompletnost je pinout k nahlédnutí zde:
enum Pins {
StatusLED = 46,
ILED = 48,
ILEDConnector = 36,
ButtonLeft = 2,
ButtonRight = 0,
Servo1 = 21,
Servo2 = 38,
Sens1 = 4,
Sens2 = 5,
Sens3 = 6,
Sens4 = 7,
SensSW = 8,
SensEN = 47,
Motor1A = 11,
Motor1B = 12,
Motor2A = 45,
Motor2B = 13,
Enc1A = 40,
Enc1B = 39,
Enc2A = 41,
Enc2B = 42,
SDA = 10,
SCL = 3
}